A relação cada dia mais próxima com as inovações tecnológicas traz uma série de benefícios para o nosso dia a dia. Nesse sentido, os braços robóticos vêm ganhando cada vez mais espaço devido à grande gama de funções nas quais podem nos auxiliar. Desde no ambiente educacional até nas grandes fábricas e montadoras, o equipamento é capaz de realizar movimentos simples, porém extremamente importantes, como mover objetos, escrever, manipular pequenas peças com precisão ou mesmo fazer impressões 3D, por exemplo. Portanto, é comum encontrar braços robóticos de todos os tamanhos e com várias “carinhas” diferentes – desde os gigantescos, que auxiliam na montagem de carros, até aqueles responsáveis por tarefas mais simples e mecanizadas.
Outro grande diferencial é que essa tecnologia pode ser controlada de tantas maneiras que é possível adaptá-la aos objetivos finais de um projeto específico com facilidade. Seja por voz, pelo celular ou mesmo por movimentos e gestos, o braço robótico demonstra uma grande capacidade de se integrar ainda mais em nosso cotidiano.
Existem estudos com protótipos que originaram exoesqueletos, capazes de proporcionar ao seu usuário a retomada de movimentos antes comprometidos usando transmissores e tecnologias capazes de decodificar impulsos nervosos. O mesmo vale para projetos voltados à reabilitação da sensação do toque em pessoas cuja mobilidade é quase inexistente. Combinando o braço robótico a sensores cerebrais, os cientistas já tornaram possível que um paciente com a sensibilidade comprometida sentisse novamente.
Ainda, estão sendo desenvolvidos braços robóticos cada vez mais inteligentes para a rotina de trabalho pesado. Há uma série de projetos voltados à otimização de tarefas que envolvem força, permitindo que o operador tenha muito mais facilidade para mover grandes estruturas e ainda mais precisão para realocá-las. Essa e muitas outras iniciativas destacam a importância de um trabalho conjunto entre homem e máquina.

Construa seu braço robótico
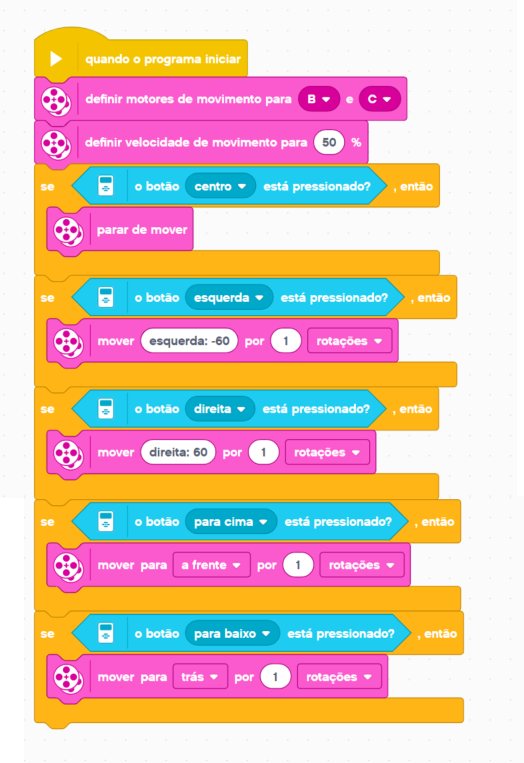
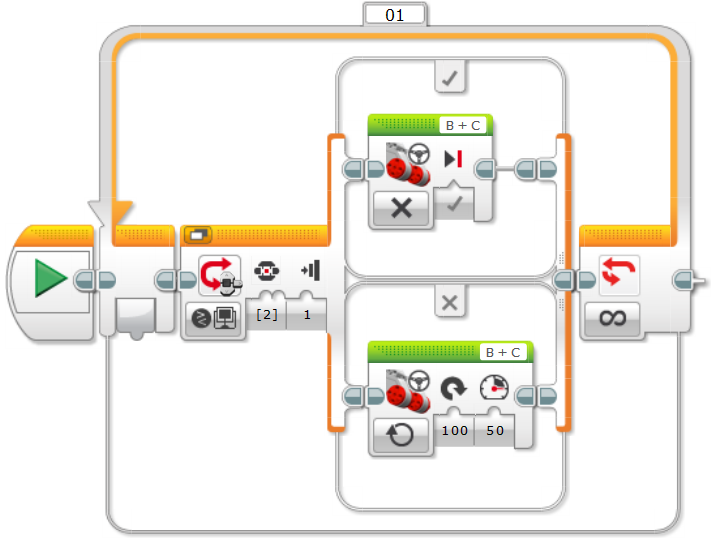
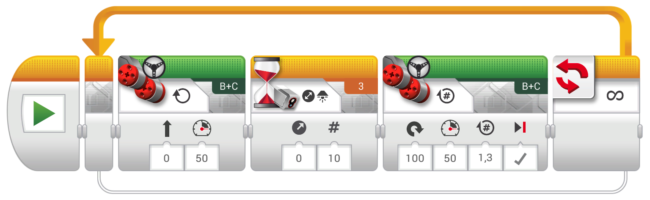
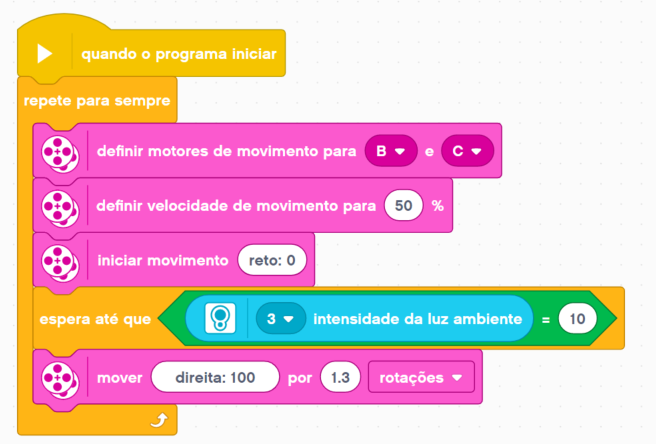
Sugestão de Programação
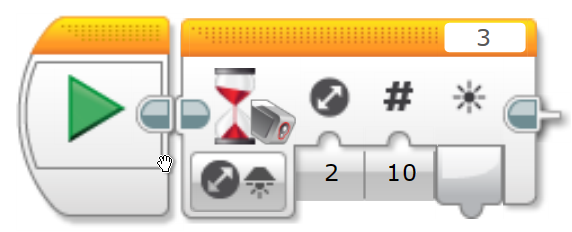
| No computador: |
|
|
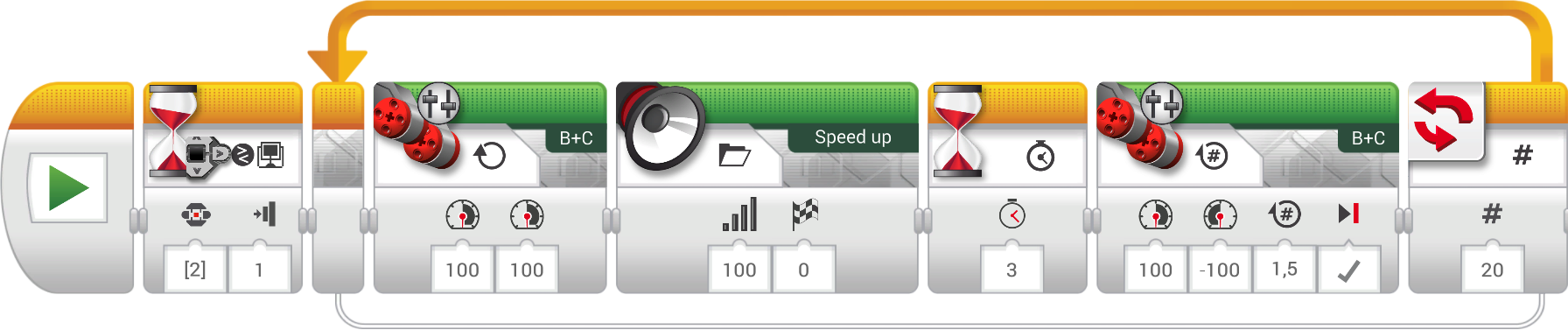
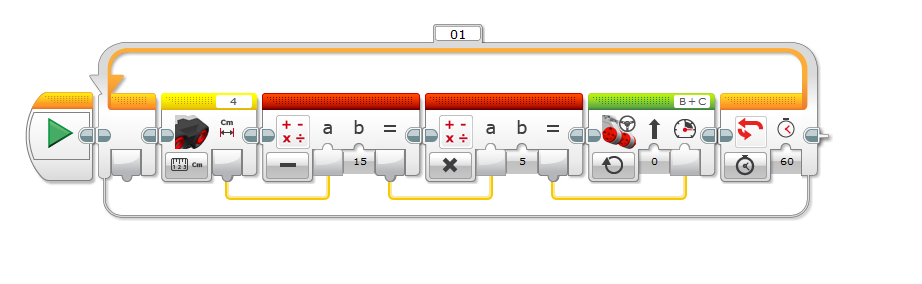
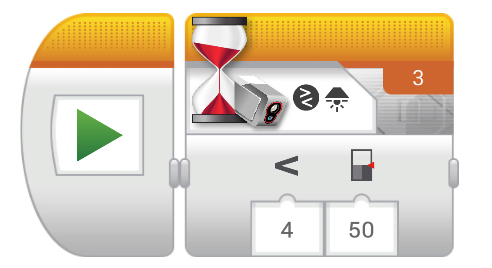
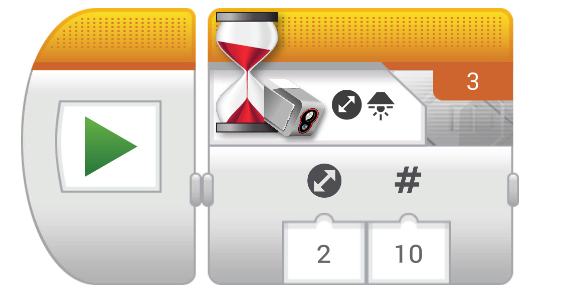
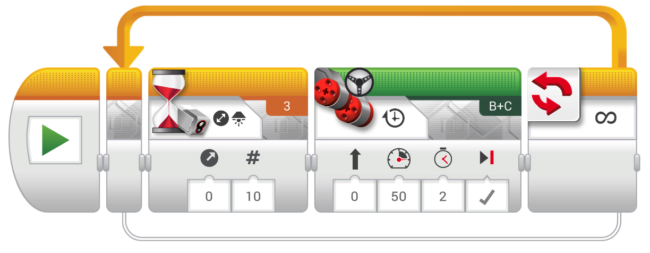
| No tablet: |
 |
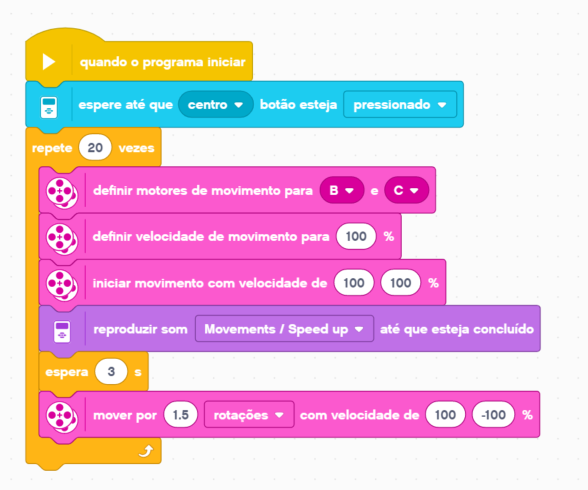
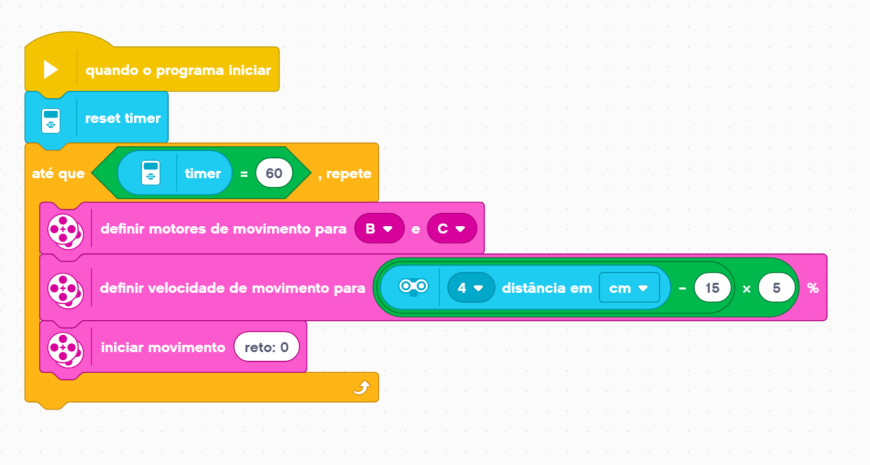
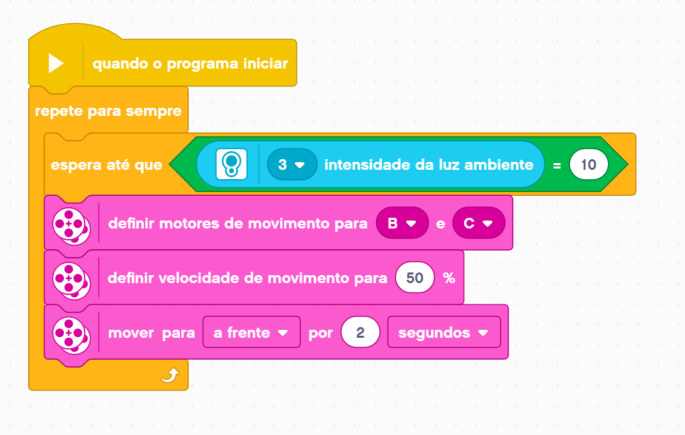
| No EV3 Classroom: |
 |
Comentários
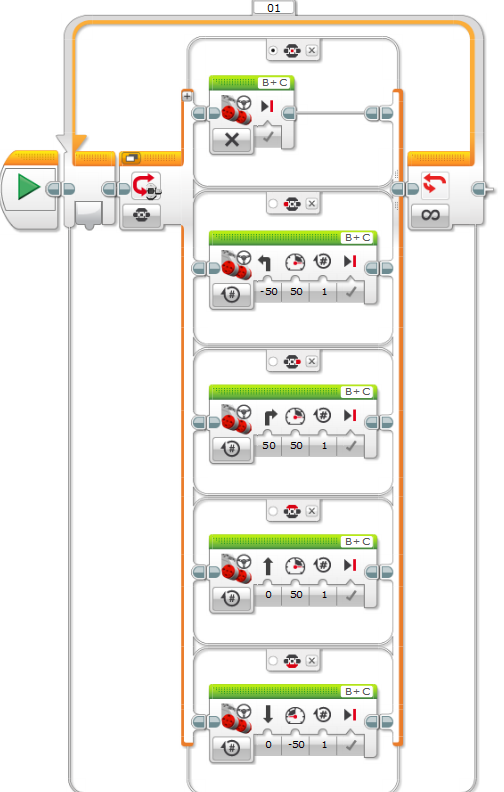
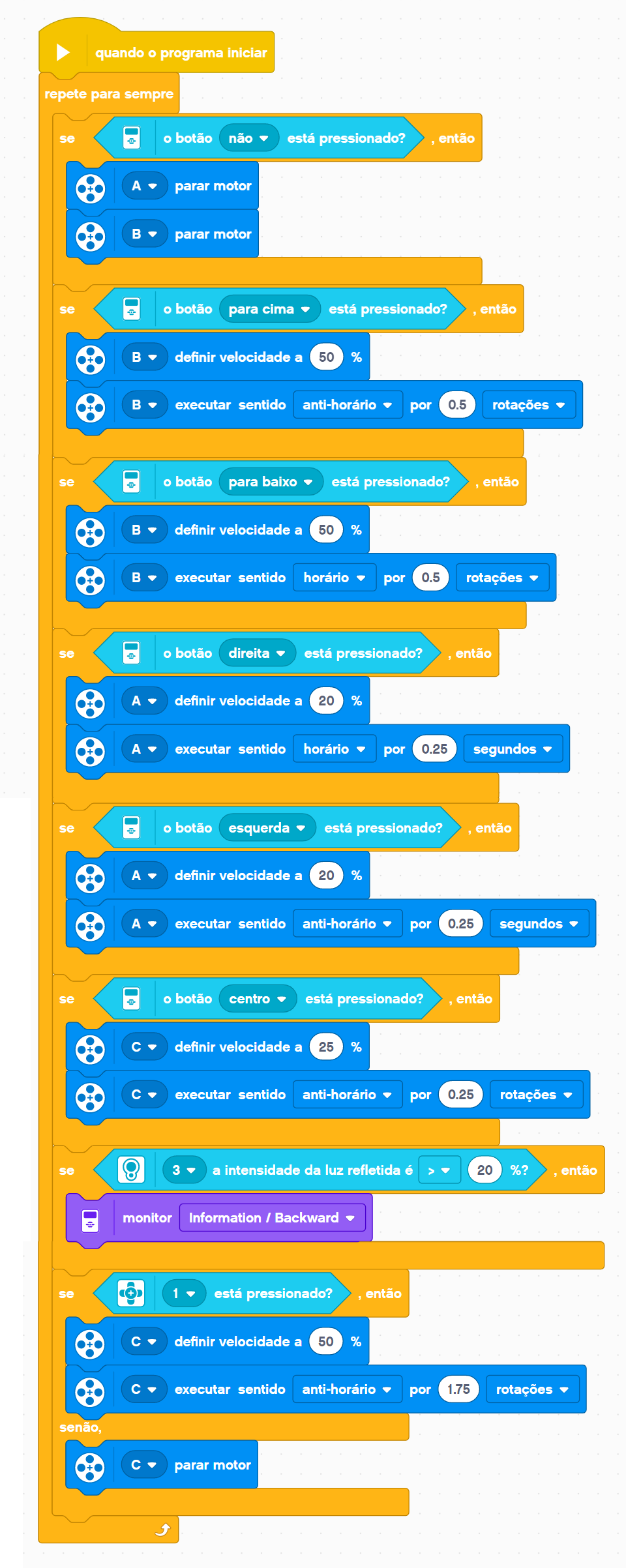
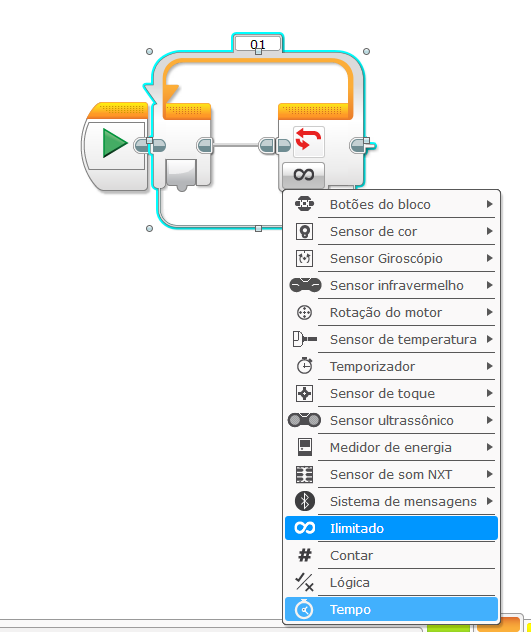
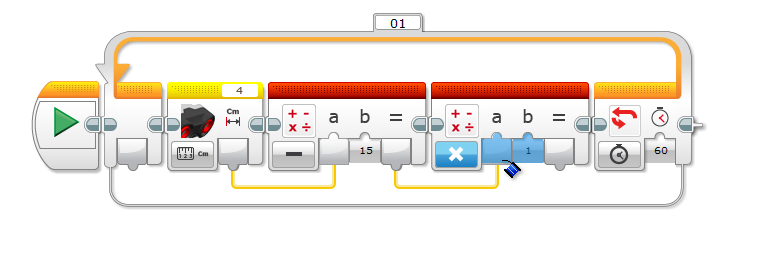
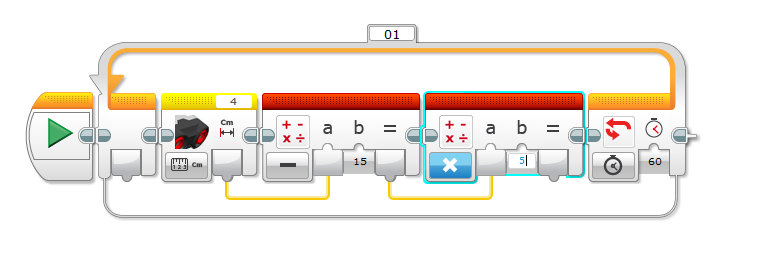
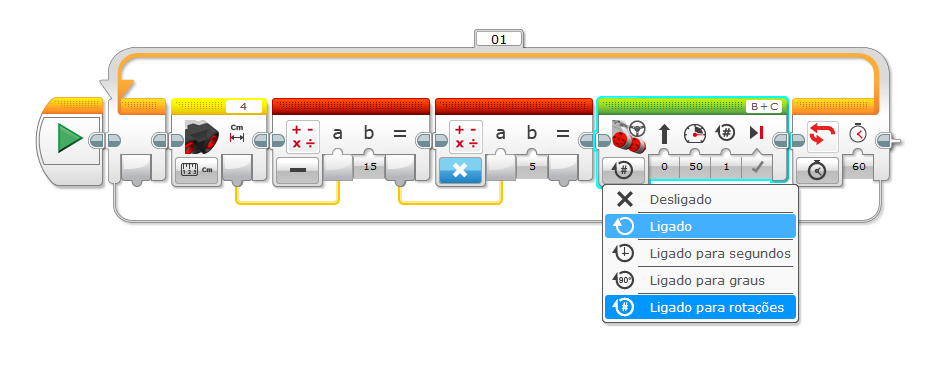
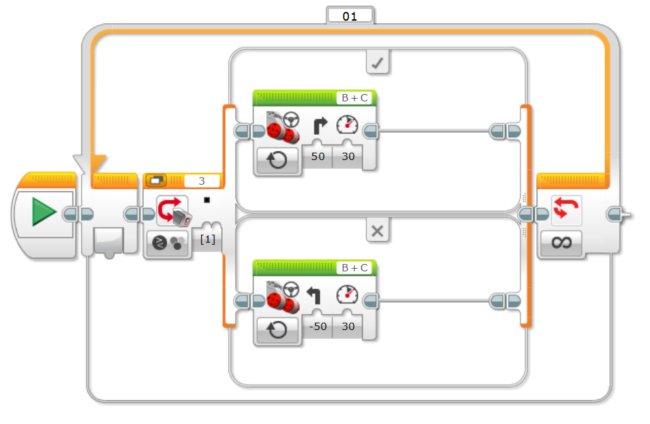
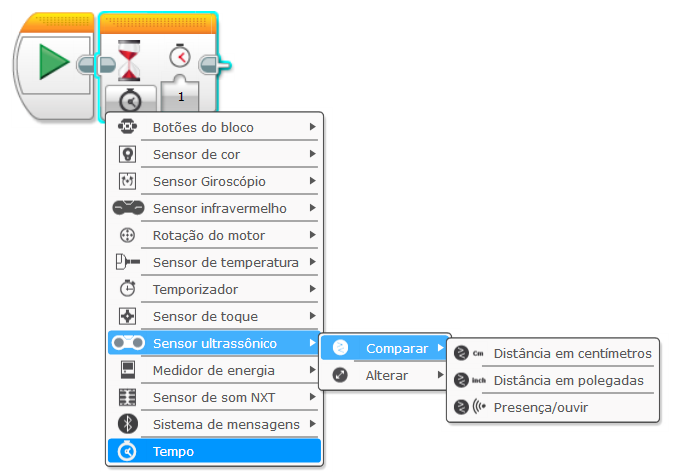
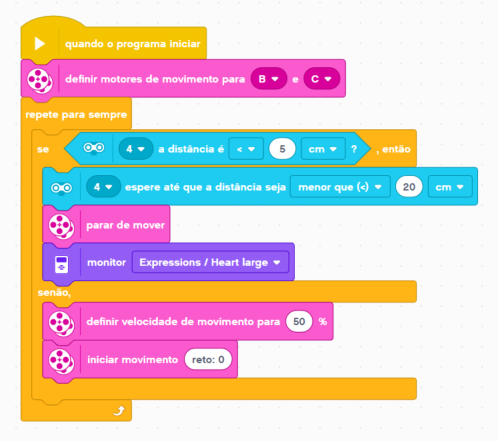
Para essas programações, tanto no EV3 Lab (versões no computador e tablet) inicia-se com o bloco condicional “se”.
Nos blocos condicionais “se” definimos qual será a nossa condição, a qual faremos uma condição para cada um dos botões do bloco do EV3 (cima, baixo, direita, esquerda, centro, não pressionado), e também para os sensores de toque e luz. Dentro de cada uma dessas condicionais, inserimos uma ação, a qual será executada se sua respectiva condicional for correspondida.
Tudo está dentro de um looping infinito, para que isso se reproduza para sempre, até que o programa seja encerrado.







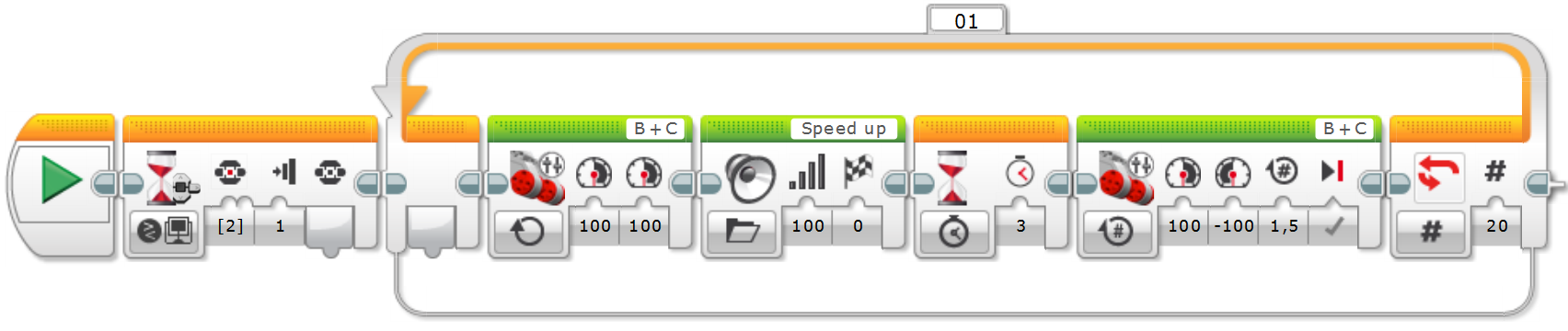
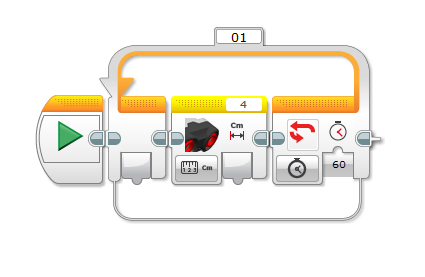
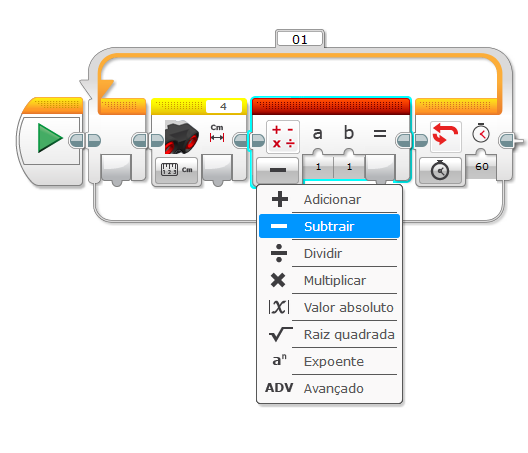
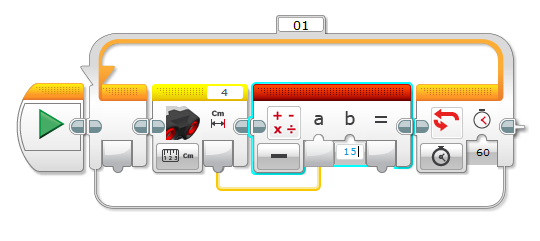

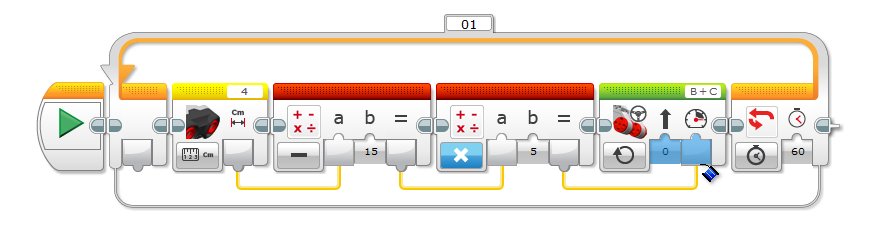
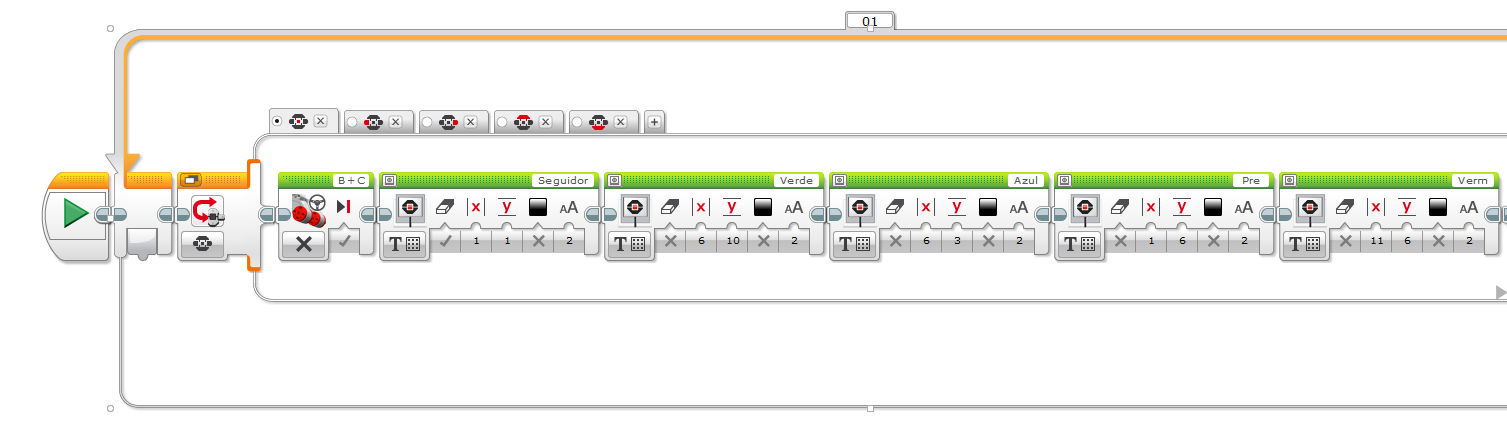
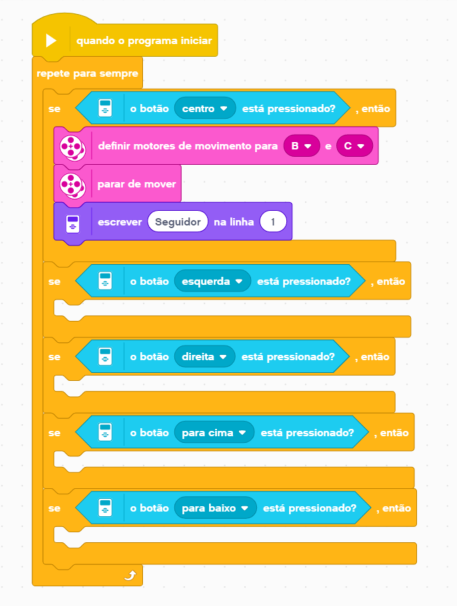

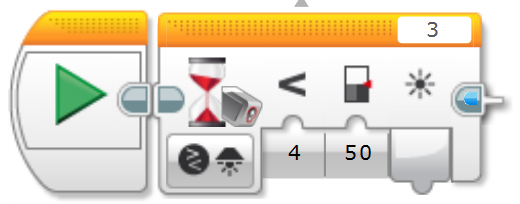
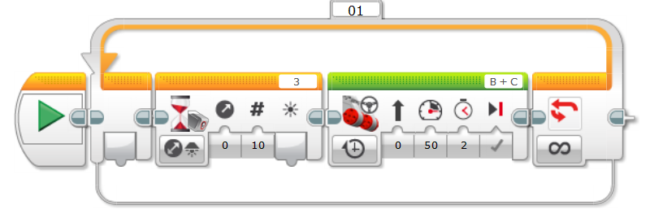
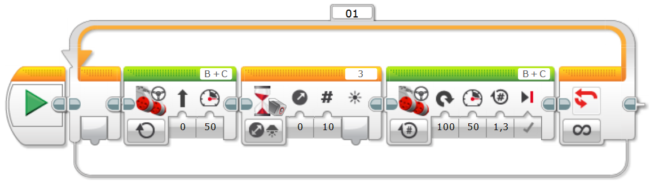



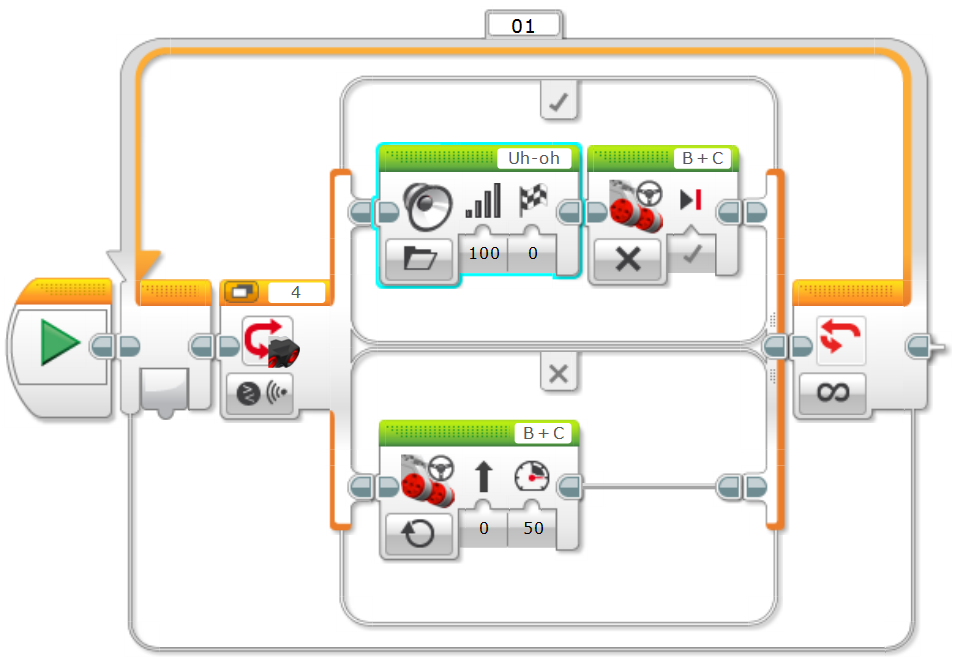
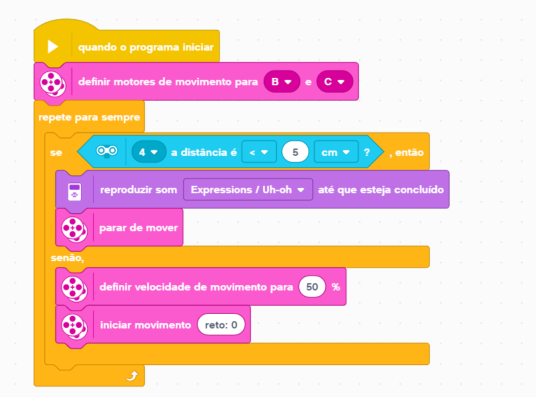 Clique na imagem para fazer o download da programação
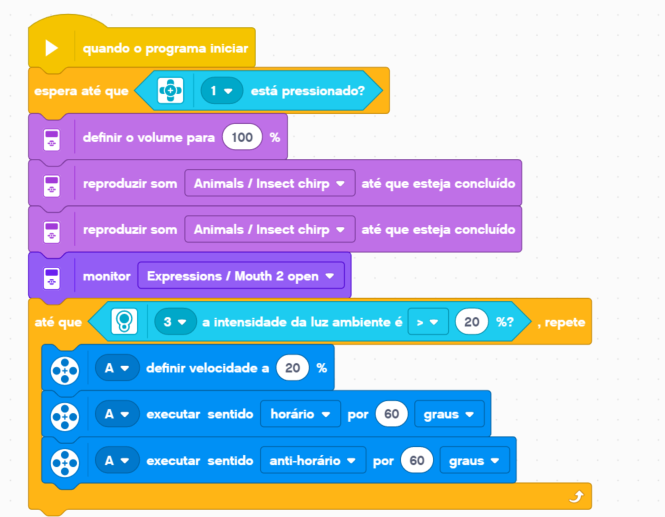
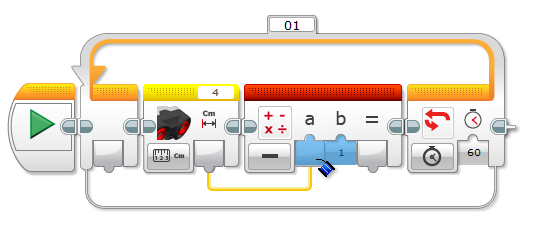
Clique na imagem para fazer o download da programação

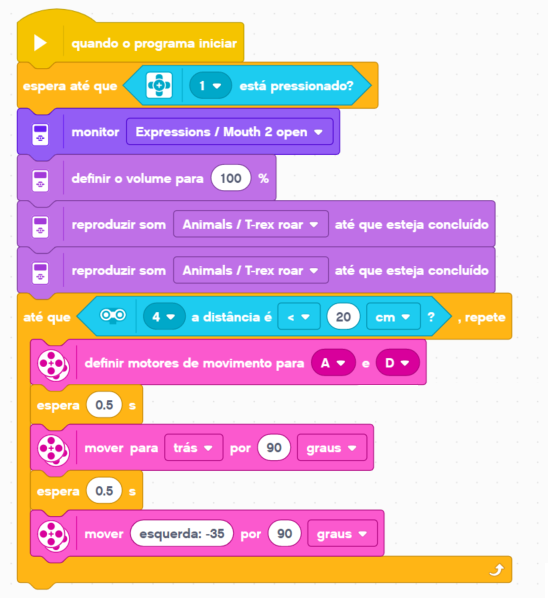
 Clique na imagem para fazer o download da programação
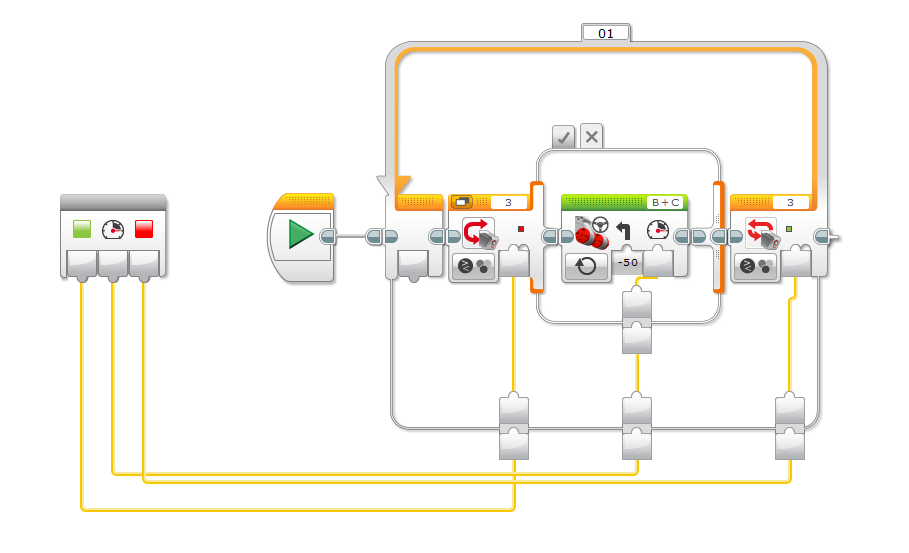
Clique na imagem para fazer o download da programação