
Você sabe como um submarino detecta inimigos embaixo da água?

Através de detecção e telemetria por Rádio, ou seja, RADAR em inglês (Radio Detection And Ranging). Os radares emitem ondas eletromagnéticas ultrassônicas por uma antena e, então, avaliam as ondas refletidas por objetos distantes. Em radares mais sofisticados, pode-se obter as velocidades dos alvos através do efeito doppler, por exemplo.
Na área militar, os radares são usados para controle de tiro em mísseis guiados, detecção de aeronaves em voo e defesa antiaérea, por exemplo. Os radares também são utilizados para controle de trafego aéreo nos aeroportos, monitoramento da atmosfera e controle de velocidade dos veículos em estradas.
Percebeu que o radar age da mesma forma que o sensor ultrassônico que vimos nas aulas anteriores?
Não é coincidência. Nosso sensor ultrassônico tem as mesmas funções de um radar. Na indústria, o sensor ultrassônico também pode ser utilizado. O vídeo abaixo mostra como conseguimos usar um sensor ultrassônico comercial para detectar folhas passando por uma esteira. No EV3, o sensor ultrassônico também pode ser usado para detectar objetos próximos e medir distâncias.
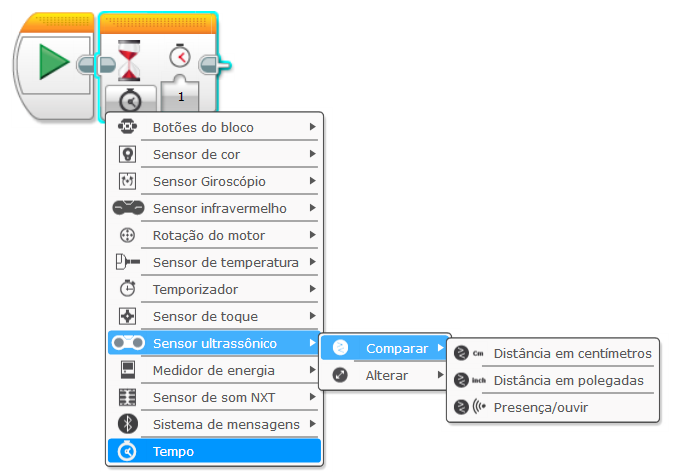
Vimos, em outra aula, todas as funções do sensor ultrassônico. Mas apenas estudamos o uso do modo distância. Agora, vamos usar a função Presença/ouvir. Essa função pode ser visualizada tanto no tablet quanto no computador. Além disso, podemos usá-la com os blocos Esperar, Comutação e Ciclo.
| No computador | No tablet |
 |
 |
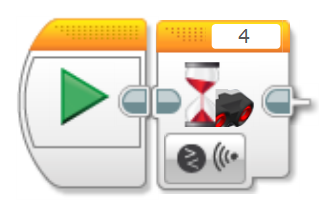
Esse bloco, como pode ser visto nas imagens abaixo, não tem opções dentro dele. Isso ocorre porque o resultado é sempre verdadeiro ou falso. Assim, ao usar esse bloco, o sensor só detecta se há, ou não, algum outro sensor ultrassônico por perto.
| No computador | No tablet |
 |
 |

Se tiver outro robô com o sensor ultrassônico, faça com que seu carrinho se movimente até o encontrar e então pare.
Monte o manual do veículo
Clique aqui para abrir o manual
![]() Não esqueça de marcar @robot.education.
Não esqueça de marcar @robot.education.
 Clique na imagem para fazer o download da programação
Clique na imagem para fazer o download da programação
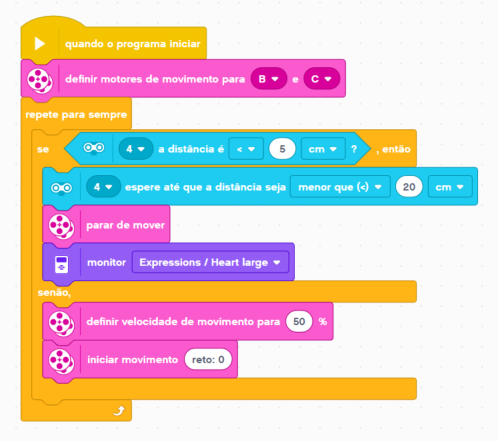
Com o mesmo código do desafio anterior, o objetivo é o contrário: faça com que os carros se toquem, mas com movimentos lentos, sem bater!
Sugestão de Programação:
- Comece colocando o bloco Ciclo.
- Agora, insira o bloco Comutação na opção Comparar e escolha como condição a função presença do sensor ultrassônico. A opção verdadeira (
 ), ou seja, quando o robô identificar o outro robô, deve ter um bloco que espera o robô estar a 20 centímetros de distância para parar sem travar as rodas.
), ou seja, quando o robô identificar o outro robô, deve ter um bloco que espera o robô estar a 20 centímetros de distância para parar sem travar as rodas. - Na opção Falsa (
 ), temos o mesmo bloco do desafio anterior.
), temos o mesmo bloco do desafio anterior.
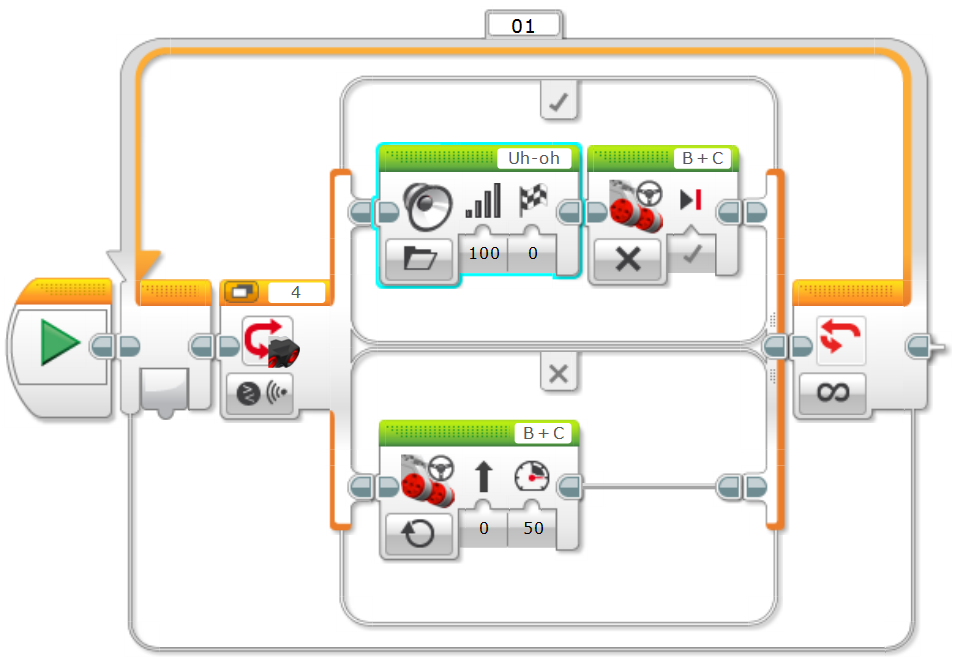
| No computador: |
 |
| No tablet: |
 |
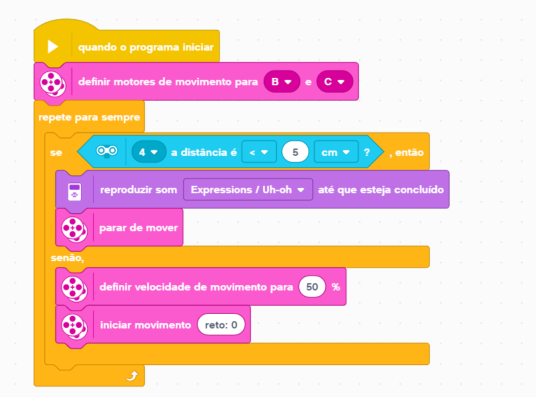
| No EV3 Classroom: |
 Clique na imagem para fazer o download da programação Clique na imagem para fazer o download da programação |



