Nas indústrias, muitas vezes, uma linha de montagem não é contínua: os diferentes estágios de produção podem estar longe um dos outros. Isso ocorre por causa da forma como a fábrica foi construída ou em razão da compatibilidade entre uma máquina e outra. Nestes casos, é importante ter uma maneira de transportar o que está sendo produzido entre as máquinas da maneira mais eficiente possível.
Um dos jeitos de fazer isso é utilizando robôs, pois, dessa maneira, não é necessário contato humano com o que é produzido. Além disso, o fato de que os robôs podem ocupar um espaço muito mais compacto do que uma empilhadeira também é um ponto positivo. Mas o maior problema é: como o robô vai andar sozinho pelo caminho que é solicitado?
A resposta para a pergunta anterior é simples: ele deve seguir algo. E um dos jeitos mais utilizados para fazer isso é seguindo linhas. Mas como isso é possível?
Se a tarefa de seguir uma linha for dada para um de nós, humanos, muito provavelmente vamos fazer isso automaticamente: vamos olhar para a linha e vamos andar na mesma direção que ela vai. Fazemos isso pois nossos olhos são muito bem desenvolvidos e temos uma noção espacial muito complexa, que envolve também nossa audição. Mas um robô não tem nenhuma dessas duas coisas e é difícil e caro construir algo assim. Logo, precisamos pensar numa outra estratégia para que isso dê certo.
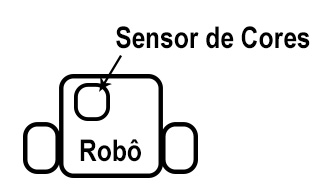
No kit EV3 temos um sensor que permite que possamos simular nossos olhos: o sensor de cores. Nessa aula, vamos aprender uma estratégia para usar esses olhos e fazer nosso robô identificar uma linha e segui-la.
Podemos fazer o robô seguir essa linha através do modo cor ou com o modo Intensidade de luz refletida. O método usado será com o modo cor. Quando fazemos um seguidor de linha, o sensor de cores é apontado para baixo a alguns milímetros do chão. Vamos programá-lo para enxergar basicamente duas cores, a da linha e a do chão. Então, vamos fazer com que o robô tente andar em cima da linha como na animação abaixo.
Sugestão de manual de montagem
Adicione agora o sensor de cores:
Desafio:
Faça o seu robô seguir a linha:
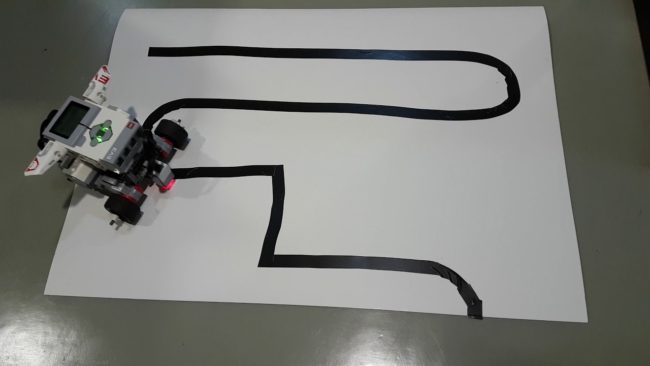
O último desafio dessa aula consiste na construção de um seguidor de linha. O robô vai ler as cores do cenário e da linha. Então, quando o sensor detectar a cor da linha, ele deve tentar sair dela. Em seguida, quando essa cor não for mais detectada, o robô deve tentar achá-la novamente. Em outras palavras, faça com que o robô fique “rebolando” na linha, achando e perdendo ela constantemente.
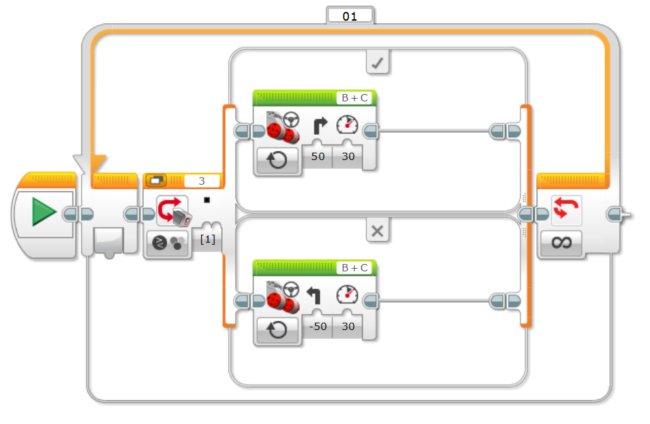
Sugestão de Programação:
- Comece colocando o bloco Ciclo no modo infinito e bloco de Comutação com a condição no modo comparar->Cor e escolha a cor Preta se sua linha preta.
- Em seguida, insira o bloco de virar para direita dentro da condição verdadeira, ou seja, quando o sensor detectar a cor preta. Então, dentro da condição falsa, inclua o bloco que vira para a esquerda.
| No computador: |
 |
| No tablet: |
 |
| No EV3 Classroom: |
 |
Modifique:
Você deve ter percebido uma série de problemas com esse seguidor de linha. Por exemplo, o movimento não é suave e se o robô perder a linha, ele não volta ao local certo. Nos próximos módulos, vamos resolver esses problemas com uma programação mais complexa. Nesse momento, altere a condição do bloco Comutação do modo Comparar -> Cor para o modo Comparar -> Intensidade de luz refletida. Houve diferença?
Altere também a potência dos motores e complete a tabela abaixo anotando no seu caderno suas descobertas.
| Modo | Potência do motor | O robô conseguiu seguir a linha corretamente? |
| Cor | 15 | |
| Cor | 30 | |
| Cor | 50 | |
| Cor | 80 | |
| Intensidade de luz refletida | 15 | |
| Intensidade de luz refletida | 30 | |
| Intensidade de luz refletida | 50 | |
| Intensidade de luz refletida | 80 |
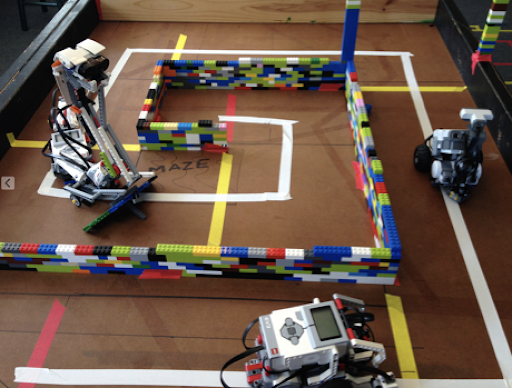
Faça um labirinto com peças ou objetos que tiver a sua disposição. Coloque, em seguida, no caminho correto, uma linha para o veículo seguir. Agora, use a programação feita no desafio anterior para que o robô percorra a linha.
Mostre para o mundo a beleza de seu labirinto e marque @robot.education.



