Os robôs mais avançados que existem, talvez sejam os que estão no espaço. Por isso, cada operação recebe uma sala de comando, para que os especialistas fiquem de olhos atentos nos dados dos sensores destes equipamentos tão caros e delicados.
Um exemplo é a ISS (International Space Station, ISS) ou EEI (Estação Espacial Internacional) que tem 6 astronautas residindo em seu interior (a quantidade de humanos na estação tenta se manter em apenas 6, mas varia em alguns casos, quando já houve até 13 pessoas, em 2009) . Estes astronautas operam experimentos científicos e procedimentos que podem distrair a atenção a problemas com a estação espacial, ou podem ainda demorar a resolver possíveis problemas. Como resultado existe uma equipe aqui na Terra com especialistas sempre prontos.
A imagem acima é a central de comando da estação espacial internacional, na cidade de Huston nos EUA. Apenas nesta imagem podemos ver 12 pessoas concentradas nos dados da estação espacial que nunca fica sozinha. Estes cientistas fazem revezamento para estarem sempre de olhos nos dados dos sensores. Note que nas telas de computador existem apenas gráficos e números. Não se engane, essas pessoas não são menos importante que os astronautas.
No vídeo abaixo, veja a comemoração da equipe da sala de comando do robô Curiosity, ao pousar com sucesso em Marte.
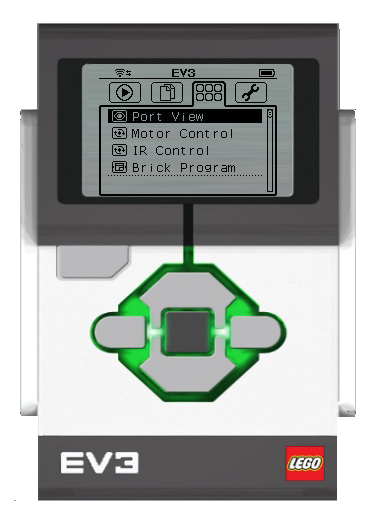
No EV3 existem duas formas de acessar o Port View, ou Visão das Portas: uma no programa do tablet ou notebook e outra no próprio EV3.
| No computador | No tablet |
 |
 |
Esta função é muito útil para entender o que os sensores estão lendo de fato e facilitar a programação. Em outras palavras, com o Port View podemos acessar os dados dos sensores em tempo real, ou ler o Raw Data dos sensores, em vocabulário de programador. Para acessar a tela da foto abaixo, navegue através dos botões do EV3 até a lista de aplicativos instalados e selecione o Port View. Conecte o sensor ultrassônico na porta 1 e teste os valores lidos.
 |
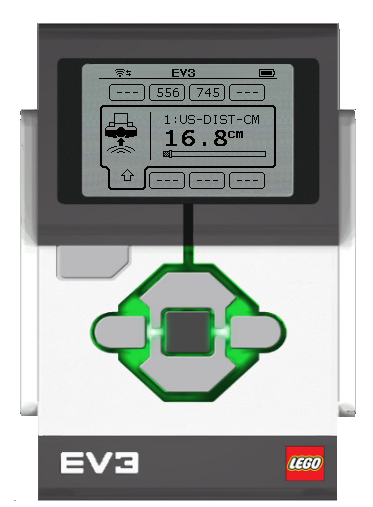 |
Cada sensor tem modos de operação diferentes, no ultrassônico, ou simplesmente US, existem os seguinte:
- US-DIST-CM: distância medida em centímetros.
- US-DIST-IN: distância medida em polegadas.
- US-LISTEN: retorna verdadeiro ou falso quando algo passar pelo sensor.

Faça seu robô andar para frente e parar a 10 cm da parede. Confira os valores no sensor ultrassônico antes de começar e certifique-se de que ele está funcionando, não faça como o R2D2.
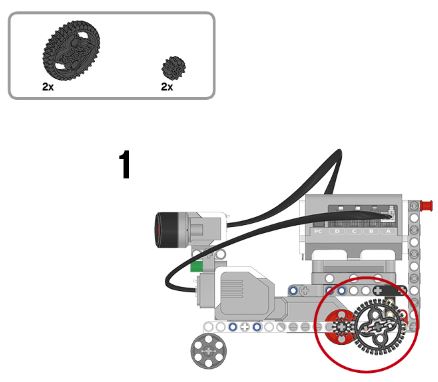
Monte o manual do veículo:
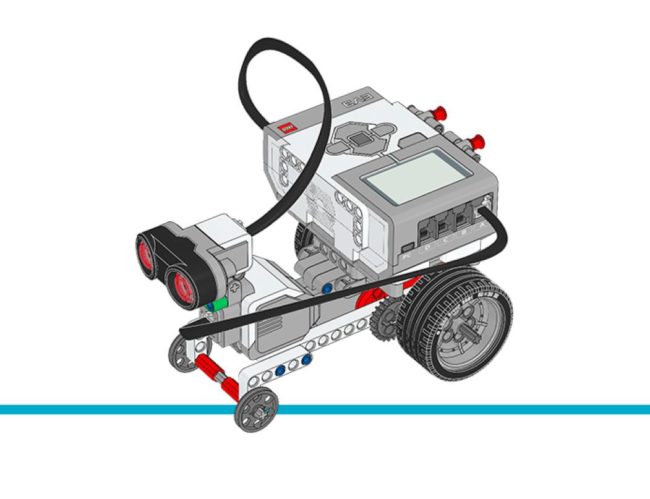
Clique para abrir o Manual
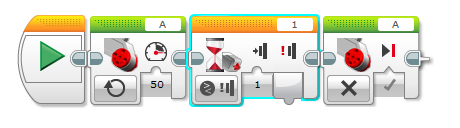
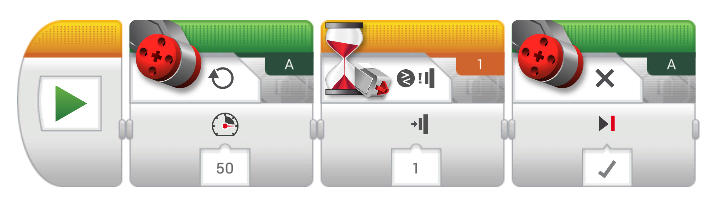
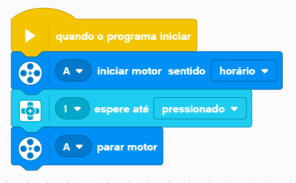
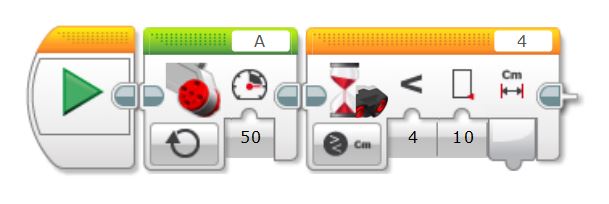
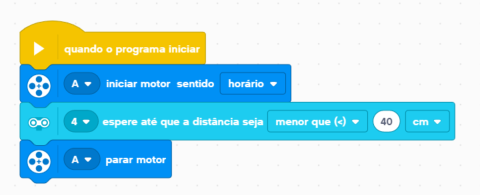
Sugestão de programação:
Note que na sugestão de programação o bloco utilizado é o Motor Grande, no modo ligado.
| No computador | No tablet |
 |
 |
 |
 |
 |
 |
 |
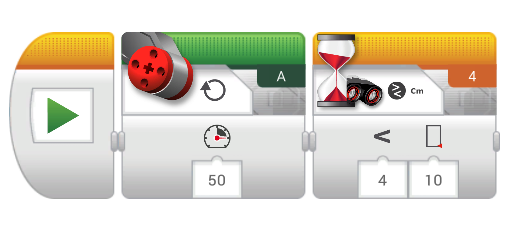 |
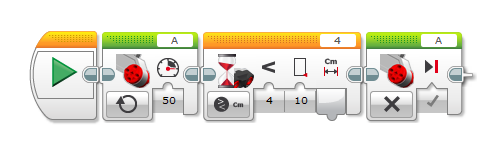
- O primeiro bloco liga os motores com potência em 50%.
- O segundo bloco identifica que o veículo está a uma distância inferior a 10 centímetros da parede.
Agora, só falta um bloco para terminar o código desse robô. Sabe qual é?

Como desafio extra, faça o mesmo, mas agora com outros sensores. Cuidado com a velocidade! Os outros sensores não conseguem perceber obstáculos tão distantes. Antes de começar, modifique o esquema de engrenagens conforme a página 48 do manual. Essa alteração vai fazer o seu robô andar mais devagar.
Sensor de Toque
 Remova o sensor de cores e substitua pelo sensor de toque. Verifique no Port View como este sensor responde à parede e programe o seu robô para parar antes de bater. Note que o robô vai precisar tocar na parede para conseguir parar.
Remova o sensor de cores e substitua pelo sensor de toque. Verifique no Port View como este sensor responde à parede e programe o seu robô para parar antes de bater. Note que o robô vai precisar tocar na parede para conseguir parar.
![]() Quando conseguir montar e programar, não esqueça de nos mostrar no Instagram e marcar @robot.education !!
Quando conseguir montar e programar, não esqueça de nos mostrar no Instagram e marcar @robot.education !!