
Nós pensamos sempre em robôs com várias funções, que operam para todos os lados e muitos deles até se parecem com um humano. Mas a maioria deles deve apenas exercer uma função, como estes que estão embaixo dos carros da imagem acima: apenas andar em linha reta.
Ainda bem que são robôs! Seria um trabalho muito monótono e cansativo de fazer por um humano. Imagine-se empurrando um carro, bem devagar, com velocidade constante, sem parar para descansar, o dia todo, todos os dias! Seria enlouquecedor, não é mesmo?
No começo das fábricas era assim mesmo, e as pessoas que trabalhavam na primeira fábrica de veículos da Ford se uniram para reivindicar uma melhoria no sistema de produção atual que os estava deixando loucos com a monotonia e repetição de tarefas. Portanto foram instalados correntes no carros que eram puxadas de cima por um sistema de polias e os montadores podiam ir acompanhando os carros que se moviam sozinhos pela linha de produção. Muitos chamam esta inovação de “o nascimento dos robôs”.

Na aula anterior, foram abordadas as noções mais básicas de como o robô pode funcionar. Agora concentraremos a atenção na movimentação do robô, mais especificamente fazê-lo mover-se em linha reta, tanto para frente, quanto para trás, com o bloco Mover Direção.
| No computador | No tablet |
 |
 |
Não é difícil, mas não é tão simples assim. Comecemos estudando o bloco de programação e o conceito de sentido horário e anti-horário. Este bloco é utilizado para controlar os dois motores grandes do Ev3, quando montados juntos em formato de veículo.
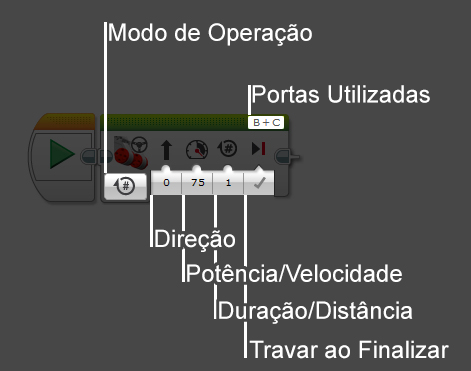
- Modo de operação: Forma como controlaremos a duração ou distância que os motores se movimentarão.
- Portas Utilizadas: as portas onde se encontram conectados os cabos. A primeira letra é o motor esquerdo e a segunda o direito.
- Direção: altera a direção do robô, como um volante.
- Potência/Velocidade: altera a potência utilizada nos motores, podendo variar de -100% até 100%. Quanto mais próximo dos extremos, maior a velocidade.
- Duração/Distância, altera:a) No modo Ligado para Segundos: o tempo, em segundos que os motores se moverão;
b) No modo Ligado para graus: quantos graus os motores se moverão;
c) No modo Ligado para rotações a quantidade de rotações que os motores farão.No modo Ligado para rotações, é importante notar que 0.5 será meia volta das rodas, por exemplo. - Travar ao finalizar: Se verdadeiro, freia ao terminar. Se falso, não freia.
Números negativos e positivos
Estamos acostumados a contar números positivos. Isto é, números mais ou menos assim: 0, 1, 2, 3, 4, 5, 7, 8, 9, …
No entanto, estes não são os únicos números que existem. Na robótica também são trabalhados os números menores do que zero. Veja como eles funcionam:
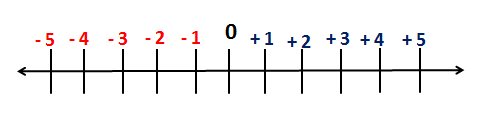
Neste gráfico que foi convencionado assim matematicamente, quanto mais pra direita, maiores são os números. O símbolo “+” antes deles é uma representação que indica que são números positivos, ou maiores que zero. Já os negativos, possuem um “-” na frente. Eles vão pra esquerda no gráfico. E quanto maior for o número, mais longe do zero ele é, e portanto, menor do que zero ele será. Importante perceber que neste caso esse números são maiores ou menores em uma questão de referência, ou seja, uma potência -100 tem força igual à uma potência +100, o que muda é essas potências fazem o motor girar em sentidos opostos: para esquerda ou para a direita.
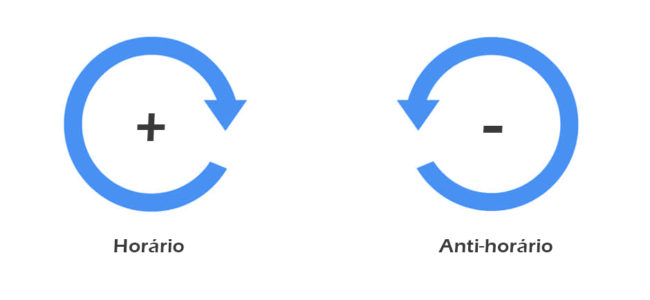
Sentidos horário e anti-horário
Antes de mais nada, pense em um relógio de ponteiros. O sentido que o ponteiro faz é chamado de sentido horário. Óbvio, não? Portanto, as potências com números positivos farão os motores girar em sentido horário.

Faça seu robô entregar uma mercadoria (qualquer objeto do estojo, uma borracha, um lápis ou uma caneta) até o outro lado da mesa e faça-o voltar depois de entregar. Simples e muito útil.
Monte o manual do veículo:

Clique para abrir o manual
Sugestão de programação:
| No computador: |
 |
| No tablet: |
 |
| No EV3 Classroom: |
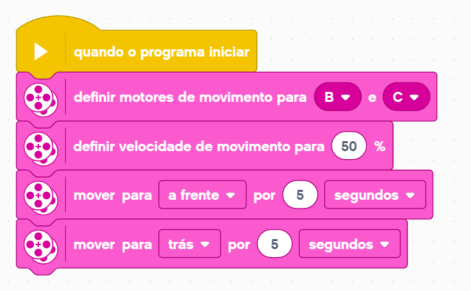
Clique na imagem para fazer o download da programação |
Modifique:
Faça o robô ir pra frente em diferentes modos, tempos e distâncias. Faça como achar melhor. O único objetivo é fazer o robô andar e testar diferentes maneiras de fazer isso.

O termo acurácia soa esquisito, mas em robótica é bastante mencionado. A acurácia é a proximidade de um resultado com o seu valor de referência real. Quanto maior a acurácia, mais próximo da referência ou valor real é o resultado encontrado. Em termos práticos, se programamos um robô para fazer 5 rotações, ele deve finalizar a tarefa em 5 rotações para ter acurácia, ou precisão de movimentos.
![]() Copie e Complete a tabela no seu caderno testando em quais situações o seu robô possui maior acurácia.
Copie e Complete a tabela no seu caderno testando em quais situações o seu robô possui maior acurácia.
Use o bloco mover direção no modo Mover para rotações, altere a potência e a quantidade de rotações em cada caso. Descubra qual o melhor conjunto de valores para garantir a precisão dos movimentos.
![]() Não esqueça de compartilhar e marcar @robot.education !!
Não esqueça de compartilhar e marcar @robot.education !!
| Potência dos motores | Quantidade de rotações | O robô parou no lugar certo? | Quantidade de rotações | O robô parou no lugar certo? |
| 10 | 1 | 3 | ||
| -10 | 1 | 3 | ||
| 20 | 1 | 3 | ||
| -20 | 1 | 3 | ||
| 50 | 1 | 3 | ||
| -50 | 1 | 3 | ||
| 100 | 1 | 3 | ||
| -100 | 1 | 3 |



