Energia eólica: o vento que gera energia

FONTE: Site Pixabay (2020).
Você sabe como é gerada a energia que chega até a sua casa? Na maioria dos lugares do nosso país a energia é gerada por hidrelétricas, que são usinas de energia movidas a água.
Mas é necessário estar sempre em busca de gerar energia de maneiras mais limpas e menos agressivas possível. É o caso da energia eólica. Ela é gerada por meio do vento, com grandes turbinas com hélices que quando giram, produzem energia. Ela é uma boa alternativa, pois utiliza-se do vento que é uma fonte “renovável” ou seja, que não vai acabar se usarmos bastante!
Como todas as alternativas, ela tem seus pontos positivos e negativos: não emite gases poluentes, pode utilizar espaços pouco explorados como o meio do oceano, entre outras, porém há um impacto negativo nas aves que voam na região que podem bater nas hélices, sua vibração é grande e pode afetar o terreno onde ela se encontra, entre outros.
Em busca de fontes alternativas e sustentáveis de geração de energia elétrica, a energia obtida através da movimentação de hélices pela força do vento – a energia eólica – tem se mostrado uma ótima alternativa.
A energia eólica é limpa, renovável e abundante, sendo possível a sua geração em vários lugares.
Como é gerada
Ela é gerada por aerogeradores, nas quais a força do vento é captada por hélices ligadas a uma turbina que aciona um gerador elétrico. A quantidade de energia transferida é em função da densidade do ar, de região coberta pela rotação das hélices e da velocidade dos ventos.
História da energia eólica
O aproveitamento da energia obtida pelo vento iniciou-se em 200 A.C., sendo utilizado cataventos gigantes para bombardear água e moer grãos. Com o tempo houve muita evolução. Os moinhos de vento do tipo “horlandês” tiveram muita aplicabilidade na movimentação de máquinas.
Porém, a transformação em energia elétrica, só foi possível com o desenvolvimento de aerogeradores, que começou a aconteceu de forma sucedida na Rússia em 1931. A partir das décadas à diante houve grandes avanços.
De acordo com a Associação Brasileira de Energia Eólica (ABEEólica-Fonte de 2019), o Brasil tem um potencial de geração de energia eólica estimado em cerca de 500 gigawatts (GM), o suficiente para atender o triplo da demanda atual de energia do país. Em 2019, a energia eólica ocupou a segunda posição na matriz elétrica do Brasil.
Segundo dados da ABEEólica, em meados de abril de 2019 havia 601 parques eólicos, espalhados em 12 estados brasileiros. Isso deve-se muito a qualidade do vento, como acontece no Nordeste do Brasil, sendo que essa região produz cerca de 80 % dessa energia. O estado brasileiro campeão de produção é o Rio Grande do Norte. A seguir uma tabela mostrando o ranking de produção de energia eólica no Brasil.
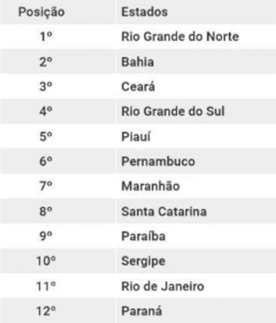
FONTE: ABEEÓLICA – DADOS DE MAIO /2019
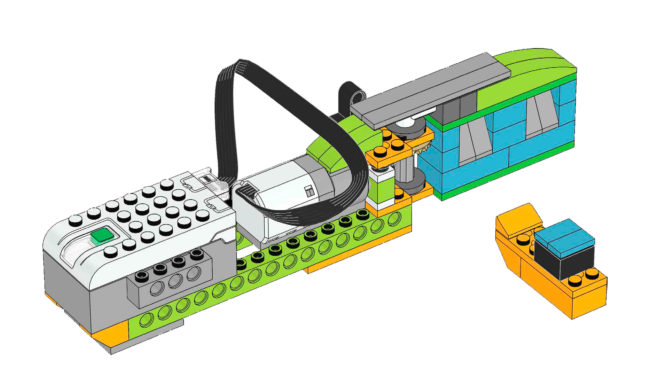
Nessa aula vamos construir um simulador de turbina eólica baseado na construção de um ventilador!
Importante! Perceba que este é um simulador de uma turbina, pois as nossas hélices de Lego serão giradas por um motor, mas na vida real as hélices são giradas pelo vendo e esse movimento, produz energia, ok?!

Clique na imagem para abrir o manual de montagem.
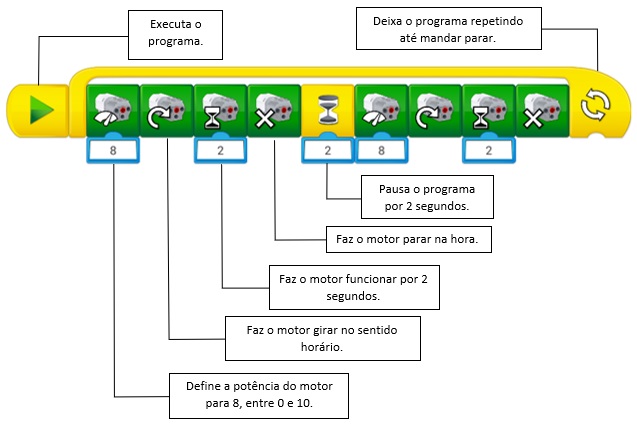
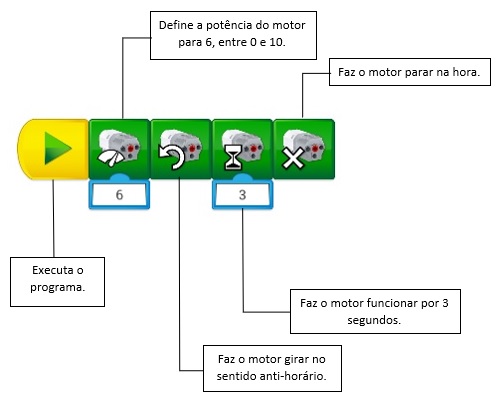
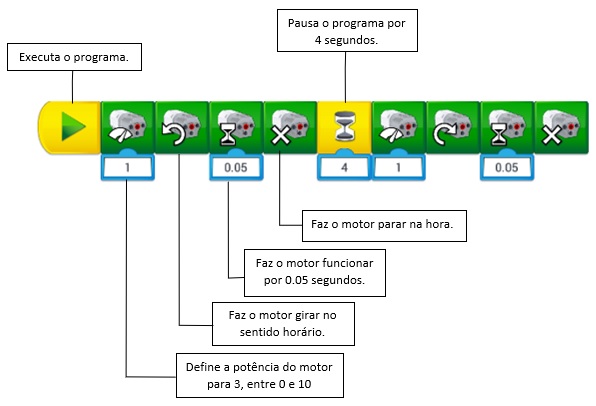
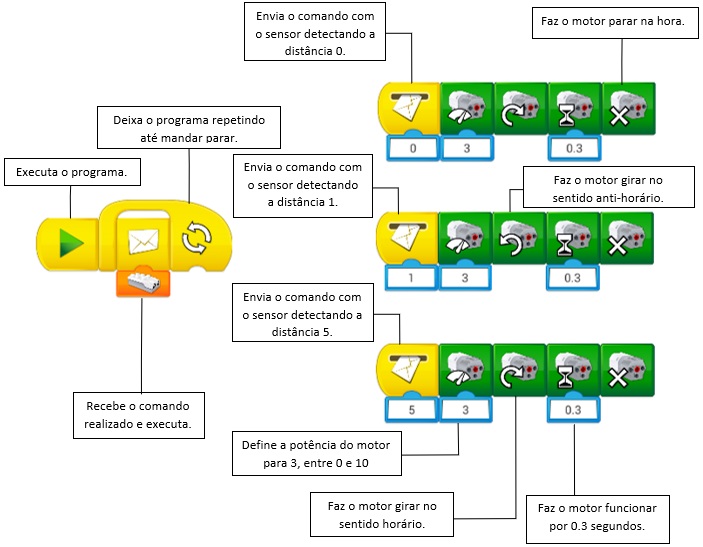
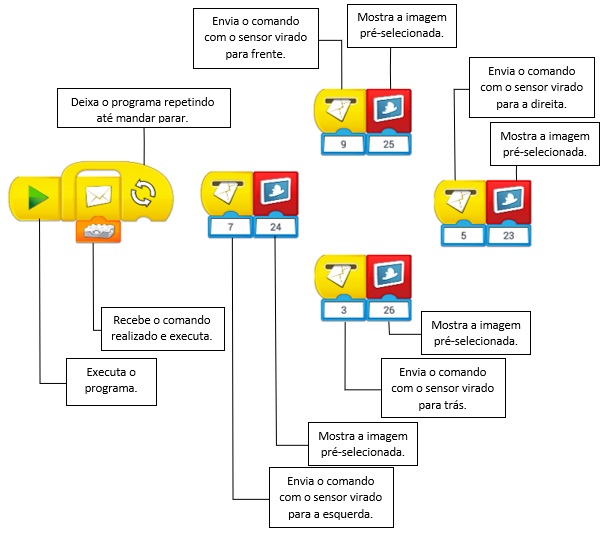
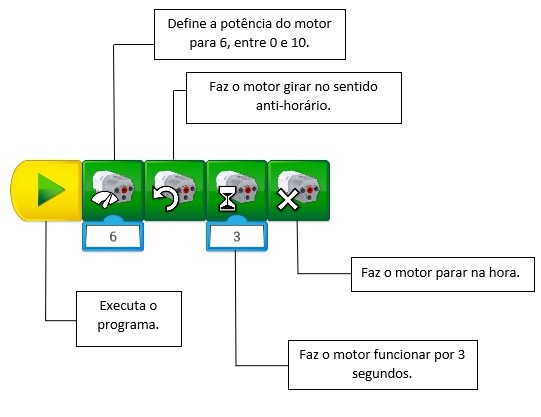
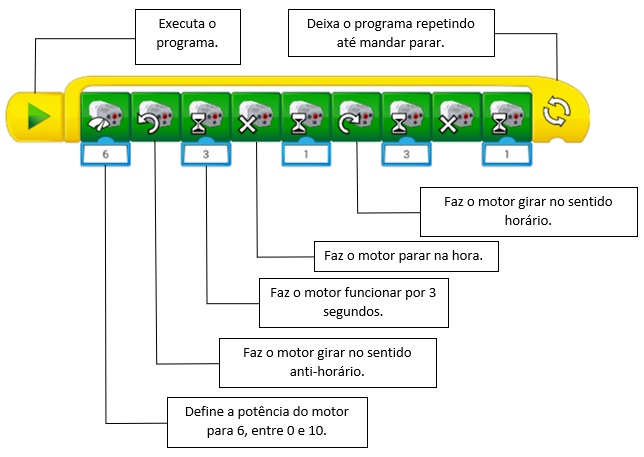
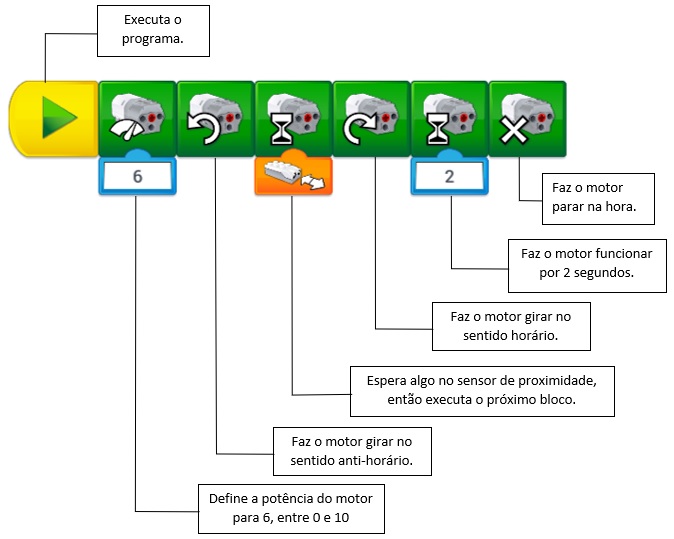
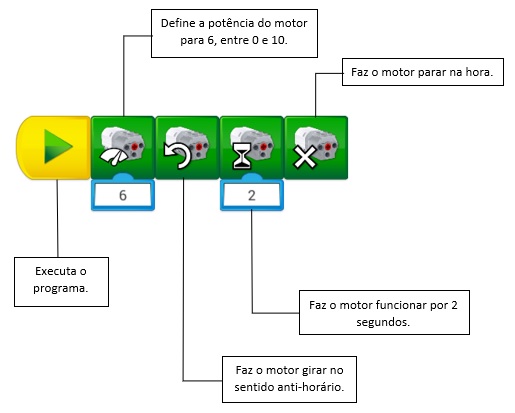
Sugestão de programação:

Nesse código lógico é abordado:
- Uso de controle de sentido de rotação pela inclinação (sensor de inclinação);
- Uso de estrutura condicional de acordo com grau de inclinação diagnosticada pelo sensor;
O objetivo de desenvolver um sistema que possibilite o giro das hélices de acordo com a inclinação diagnosticada pelo sensor.