Robôs enxergam o mundo de uma forma diferente: através de sensores.
A palavra sensor tem a mesma origem da palavra sentido, do latim sensos, ou seja, a habilidade de sentir. Nós, humanos, possuímos 5 sentidos que são operados por 5 diferentes sensores:
- Visão: permite ver a luz, com os olhos;
- Audição: possibilita escutar sons, com nossos ouvidos;
- Tato: permite sentir pressão e temperatura, com nossa pele;
- Olfato: propicia a interpretação do cheiro das coisas, com nossos narizes;
- Paladar: permite interpretar o gosto das coisas, com nossa língua;

Esses 5 sentidos possuem diversas aplicações e nascemos com eles. Um sensor em um robô permite que ele possa interpretar o mundo sem a necessidade da interferência humana. O robô que precisa entender a cor de um objeto, terá um sensor de cores. Outro, que precisa entender sua posição em relação a um objeto, terá um sensor de distância.
Dessa maneira, os robôs podem virar para a direita quando detecta a cor verde, ou para a esquerda quando detectam a cor vermelha. Além disso, podem perceber que vão bater na parede e conseguir desviar dela.
No Ev3, temos os seguintes sensores:
- Cor: Mede cor e quantidade de luz;
- Giroscópio: Mede angulação;
- Ultrassônico: Mede a distância de superfícies próximas;
- Toque: Mede contato com uma superfície.
Podemos fazer um paralelo entre os sensores dos nossos robôs e os nossos.
- O sensor de cor é como se fosse nossos olhos;
- O giroscópio, nossos ouvidos internos;
- O ultrassônico, nossos olhos em conjunto com nossos ouvidos e pele;
- O de toque, nossa pele.
Em resumo, os sensores permitem que os robôs consigam ser automatizados. Isto é, que ajam sozinhos de acordo com o que detectam. No vídeo abaixo, vemos uma aplicação disso na indústria automobilística. O vídeo abaixo mostra como, num processo automatizado, a porta de um carro é formada.
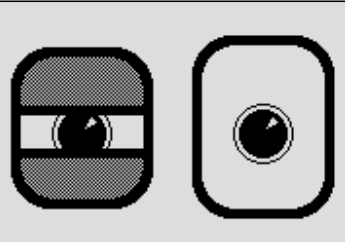
Sabemos o que é um sensor e como ele funciona. Então, vamos entender o que é o sensor de toque.

Como podemos ver na imagem acima, o sensor de toques é, pura e simplesmente, um botão. Na programação, o EV3 classifica cada estado com um número. Dessa maneira, existem três possibilidades para ele:
- 0 – Solto: quando não apertamos ele;
- 1 – Pressionado: quando apertamos ele e seguramos;
- 2 – Pulsado: quando pressionamos rapidamente o botão.
Por isso, na hora de escolher os blocos, caso seja necessário usar o botão no modo Pulsado, por exemplo, deve-se definir o número 2 no bloco. Este sensor é muito usado em robôs que precisem se mover caso toquem em algo, como uma parede. Às vezes, também, precisamos que só se movam ou façam uma ação até que o botão seja pressionado. Esse é possivelmente o mais básico dos nossos sensores.
Usando o sensor de toque
Apenas no computador, existe um bloco sensor de toque na aba amarela. Esse bloco permite armazenar o valor medido pelo sensor e comparar informações do sensor. Como são possíveis apenas 3 estados para o sensor, os valores sempre serão 0,1 ou 2. Os valores armazenados podem ser usados para desencadear outros blocos de programação, por exemplo.
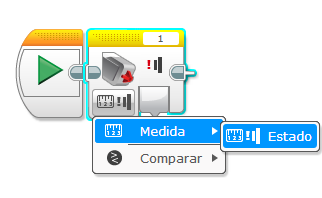
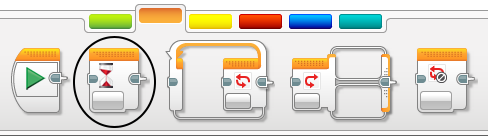
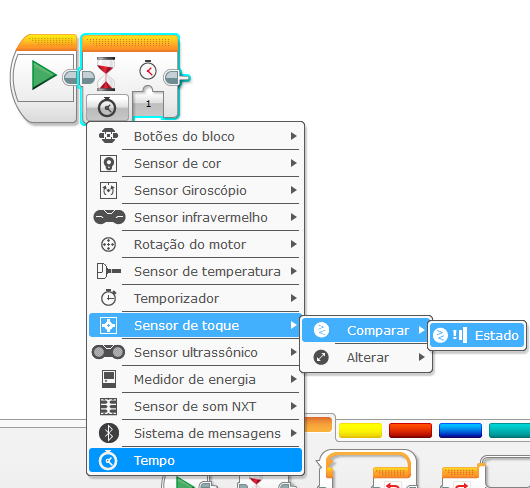
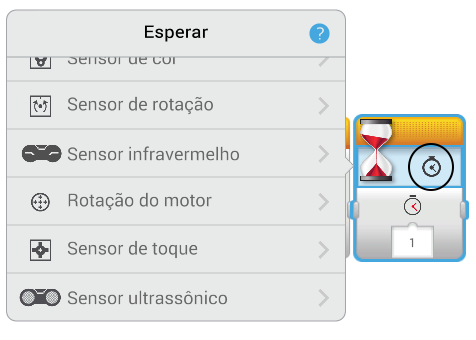
No entanto, nesse momento, vamos usar a opção sensor de toque dentro do bloco Esperar. As opções disponíveis dentro das opções desse bloco são:
- Comparar -> Estado: confere o estado esperado com o estado atual.
- Alterar -> Estado: verifica se há mudança no estado do botão.
As opções dentro do bloco Esperar permitem que o programa espere por uma leitura específica do sensor antes de continuar a executar os outros blocos.
| No computador | No tablet |
 |
 |
 |
 |
Construa o veículo educador com o sensor de toque abaixo.
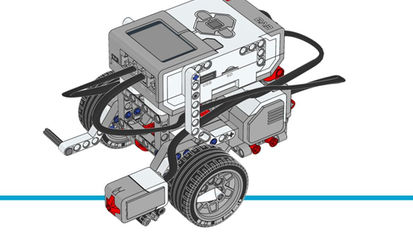
Clique aqui para abrir o manual
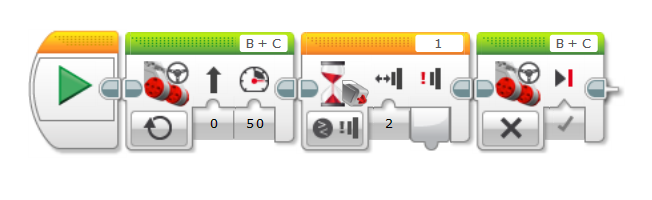
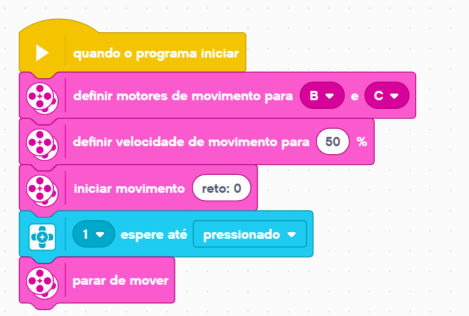
Faça com que o robô ande em linha reta até encostrar o sensor.
Para isso, comece usando o bloco Mover direção, pois queremos que ele se mova até determinada condição ser cumprida. Em seguida, precisamos usar o bloco Esperar e selecionar a opção Sensor de toque -> Comparar -> Estado. Esse bloco vai segurar o fluxo de dados até o botão for encostado. Mas não vai segurar o movimento do carrinho. Ou seja, ele vai se mover esperando algo acontecer e, depois de tocar no sensor, o próximo bloco vai ser executado. Cuidado com a potência utilizada. Será difícil de parar o robô se ele estiver andando muito rápido.
| No computador | No tablet |
 |
 |
Por fim, deve-se colocar um bloco que permita o robô parar quando esse sensor for pressionado. Sabe qual bloco temos que usar?

Usando o mesmo código do desafio anterior, faça aparecer na tela do seu robô uma carinha feliz enquanto ele está andando. Quando ele bater na parede, faça-o ficar com os olhos machucados.
![]() Aproveite essa oportunidade para publicar seu robozinho no Instagram marcando @robot.education !!
Aproveite essa oportunidade para publicar seu robozinho no Instagram marcando @robot.education !!