Conectar
Você sabe o que é um motor?
 Fonte: https://www.instructables.com/id/Complete-Motor-Guide-for-Robotics/
Fonte: https://www.instructables.com/id/Complete-Motor-Guide-for-Robotics/
Por definição, um motor é um dispositivo que converte alguma forma de energia em energia mecânica, fazendo seu eixo interno girar, e acabar movimentando algum veículo ou máquina. O motor elétrico nesse caso, converterá a energia elétrica em forças eletromagnéticas que farão que o eixo interno gire.
Existem diversas classificações para os tipos de motores, os primeiros foram criados pela tração animal (isso envolve força humana também), onde foram criados os primeiros moinhos e guindastes. Depois foram criadas as turbinas, que podem transformar a energia da correnteza da água, da velocidade dos ventos, da energia provinda do sol, entre outras. Depois, foram criados os motores à gás, à vapor, a pistões e por fim os motores elétricos, que são os mais amplamente utilizados hoje em dia.
 Fonte: https://www.learn.voltaat.com/post/sg90-servo
Fonte: https://www.learn.voltaat.com/post/sg90-servo
Curiosidade: Os motores elétricos de baixa tensão (utilizados na robótica e eletrônica básica), possuem dificuldades para serem controlados, devido a sua dificuldade na regulação da alimentação. Devido a isso, foram criados os motores servos, que possuem um mini circuito interno que pode ser programado para aumentar ou diminuir a velocidade, também como começar e parar quando for pedido.
Construir
Materiais necessários:
- Acesso ao MakeCode
- micro:bit + cabo usb + bateria (opcional)
- 1 cabos de ponta jacaré
- 1 motor servo
- bateria 4,5V
Antes de iniciar o primeiro projeto com um motor servo (esse componente azul com 3 cabos presos à ele), é necessário saber como funciona e para que servem os cabos dele.

Os motores servos são amplamente utilizados na robótica, junto com outros motores e sensores, constituem os componentes bases dessa área. Esse tipo de motor é usado quando necessita fazer o controle de movimento de alta precisão, como em máquinas, por exemplo para encaixar peças umas nas outras. A principal diferença desse motor para os outros tipos é a existência de dois componentes: um sensor de velocidade e um controlador. Isso faz com que o motor consiga ser programado para ir e parar quando quiser sem ter a necessidade de cortar a alimentação.
- AVISO: Nunca tente forçar a rotação dele, isso pode danificar as partes internas do motor!
Programação:
Existem duas formas de controlarmos os servo motores através do MakeCode, com o menu Pins e a extensão servo, portanto podemos testar os dois modos. É importante lembrar que no simulador, o MakeCode permite conectarmos um servo diretamente ao 3V do micro:bit e não a bateria de 4,5V, porém, isso só é valido para servo motores específicos, e os motores servos comuns exigem que seja conectado à bateria externa, por isso 3 pilhas AA.
- No menu Entrada pegue os blocos no botão A pressionado e no botão B pressionado
- Em seguida, dentro de Avançado, acesse o menu Pins e pegue o bloco servo grava pin P0 para 180 (isso significa que o servo vai dar 50% de uma volta) e coloque dentro de no botão A pressionado
- Dentro de no botão B pressionado, coloque set servo P0 angle to 90º (isso significa que o servo dará 25% de uma volta), que pode ser encontrado em Avançado–Extensões–servo.
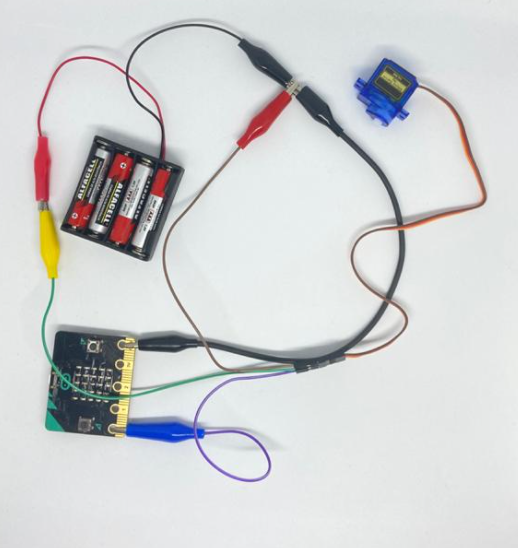
Montagem:
Siga as instruções abaixo para montar o projeto.
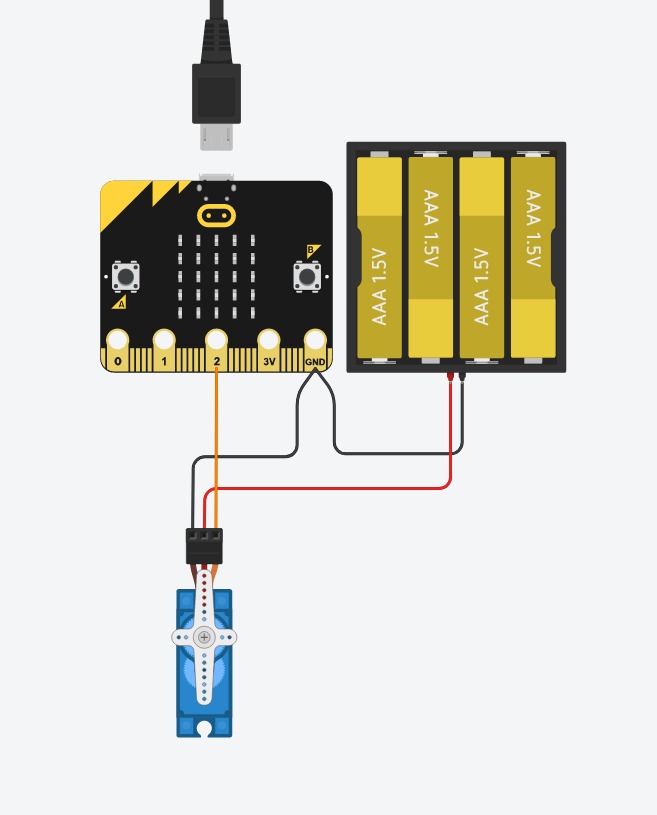 A ligação do servo motor será sempre da mesma maneira, como na imagem acima. Partindo do servo, o seu cabo preto representa o GND, ou seja, seu lado negativo, então conecte ao pino azul da bateria.
A ligação do servo motor será sempre da mesma maneira, como na imagem acima. Partindo do servo, o seu cabo preto representa o GND, ou seja, seu lado negativo, então conecte ao pino azul da bateria.- O cabo da cor vermelha normalmente representa o seu polo positivo, por onde chegará a energia das pilhas, então conecte-o no pino vermelho da bateria.
- E seu cabo amarelo deverá ser conectado ao P0, que receberá o sinal vindo do micro:bit.
- Além disso, conecte um cabo jacaré também ao negativo da bateria (pino azul), ligando ao GND do micro:bit, isso fará com que o motor servo tenha uma referência para o seu sinal.
AVISO 2: Sempre retire as pilhas da caixinha após finalizar o projeto. Durante o projeto os terminais da caixinha esquentam, e depois mesmo desconectada de algum aparelho, esses terminais podem ”puxar” a energia das pilhas e descarregando as mesmas.
Teste o servo motor! Lembre-se de que programamos apenas 2 posições, 180º e 90º. Então quantos º (graus), tem uma volta completa?
Contemplar
Agora que você conseguiu controlar um motor servo sozinho, está na hora de adicionar mais um componente para fecharmos um circuito usando o motor. Vamos fazer o servo motor como um interruptor, aquele que liga e desliga a luz do quarto.
 Fonte: https://giphy.com/gifs/season-3-the-simpsons-3×24-xT5LMWOExnRmXt2vFS
Fonte: https://giphy.com/gifs/season-3-the-simpsons-3×24-xT5LMWOExnRmXt2vFS
- Primeiro, na programação faça com que o servo possa se deslocar entre 45º e 135º (isso fará com que eles andem 90º, visivelmente o movimento será parecido com o de um interruptor). E faça também no botão A pressionado, com que a gravação digital no P1 seja ”1”, e no botão B seja ”0”.
- Com 2 cabos jacaré conecte um led ao P1 do micro:bit, lembre-se de verificar a polaridade do mesmo.
- Grude uma bolinha, pode ser de papel alumínio, na ponta da haste do motor servo. Depois recorte um papelão no formato de um interruptor de parede, recorte no lugar onde fica o botão e posicione o motor servo.
- Escreva ”ligado” para quando a bolinha estiver para cima, e ”desligado para quando a bolinha estiver para baixo. Controle ele com os botões A e B do micro:bit.

Continuar
Compartilhe seu interruptor conosco! Queremos ver seu projeto, faça uma foto, vídeo, selfie ou boomerang e poste nas redes sociais marcando a @robot.education, assim veremos como você está se saindo!

